Hi, I have a problem with the "modes" of a rigidbody2d.
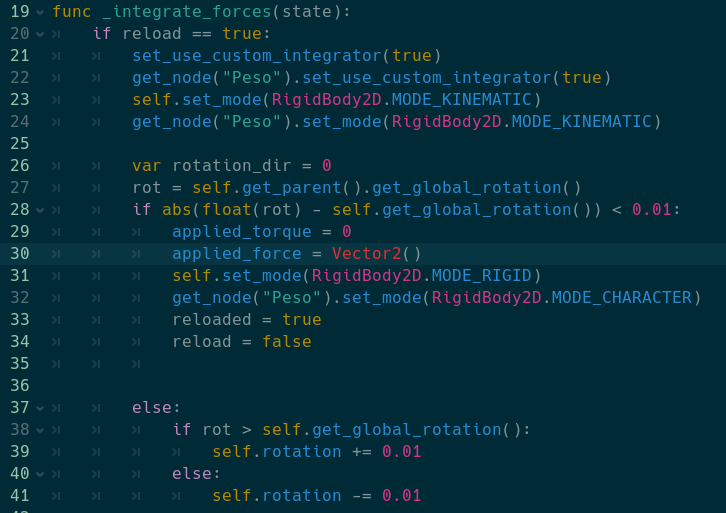
In _integrate_forces I transform the "mode" of 2 rigidbody2d held together by a pinjoint2D into "kinematic" (set_mode (RigidBody2D.MODE_KINEMATIC)) and, after moving them, I transform them back into "rigid".
At that point the pinjoint2d, while maintaining all the properties correctly, goes crazy and the rigidbody begins to roam free on the screen.
Where am I wrong?